






























Роботи све више замењују људе у постројењима за прераду хране. Једна од предности је да се тамо где роботи раде избегава контаминација производа од стране особља. Проблем је у томе што неки производи, укључујући деликатно воће и поврће, могу бити превише осетљиви да би роботи могли да рукују.
Немачки институт за прехрамбене технологије препознао је проблем и преузео изазов дизајна технологије која рукује осетљивим производима без њиховог оштећења. Циљ је био трострук:
- Да се развије нова хватаљка од еластомера (врста полимера) за хигијенско руковање неупакованом храном
- Дизајнирати роботску хватаљку која хвата осетљиве предмете без њиховог уништавања у процесу
- Дизајнирати хватаљку која је флексибилна и сигурна за хватање прехрамбених производа различитих облика, величина и завршних обрада.
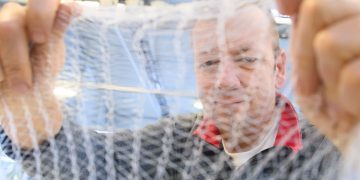
Резултат је нова хватаљка од еластомера за хигијенско руковање неупакованом храном од стране робота.
„Дизајн је инспирисан људском руком, која има веома велику флексибилност у погледу хватања и држања“, рекао је Кнут Франке из института, који је представио идеју на овогодишњем сајму Ануга ФоодТец у Келну, Немачка.
„Ово се постиже са пет прстију, који се мање-више могу померати појединачно“, рекао је он. „Поред тога, људски прсти могу да прате контуре током хватања и држања. Други аспект је била могућност да се дизајнира на веома компактан начин без механичких спојева. Због меког материјала, сила хватања није тако тачна као код тврдих хватаљки, већ је распоређена на већу површину, смањујући вршне силе.”
Технологија хватања на бази еластомера има велики потенцијал за руковање храном и нуди неколико предности у односу на конвенционалне хватаљке, укључујући хигијену и флексибилност.
Технологија је довољно прилагодљива за хватање производа различитих облика и величина и лака је за производњу. Пошто користи ТПЕ (бризгање), може се производити јефтино. Систем хватања такође има широк спектар примена.
Захтеви за хватаљке за храну
Иако може изгледати као прилично једноставна технологија, хватаљке морају испунити неколико услова да би се користиле у храни. Данас на тржишту постоји неколико врста хватаљки, укључујући механичке хватаљке, пнеуматске хватаљке (над и под притиском), електричне хватаљке и лепљиве хватаљке. Нису сви прикладни за осетљиву храну.
Механичке хватаљке, на пример, могу бити изазване силом хватања, рекао је Франке. Уопштено, користе форму или принудно закључану везу, што може довести до оштећења производа. Пошто вакуумске хватаљке усисавају течности у системе, њихова употреба може довести до наслага и потенцијалне контаминације. Као резултат тога, ниједно није погодно у смислу безбедности и квалитета хране.
Технолошки гледано, хватаљке које се користе у преради хране морају да задовоље бројне захтеве, рекао је Франке, укључујући време и дужину хватања, силу хватања и број комада који се морају ухватити.
На предмете које треба ухватити утичу бројни фактори, укључујући облик, масу, својства површине, сувоћу, лепљивост и чврстоћу. Чврстоћа и облик су посебно важни у преради производа. Услови околине, укључујући температуру и влагу, такође су тачке које треба узети у обзир. Флексибилност је такође потребна, посебно када се ради о природној варијабилности намирница.
„Генерално, принцип хватаљки од еластомера заснован је на механичким хватаљкама“, рекао је Франке. "Али уместо тврдих металних или пластичних материјала, меки еластомери се примењују као материјал за хватање у контакту са површином хране."
Друга главна разлика је принцип функције хватаљке.
„Пошто се само мекани прсти савијају под притиском, нису потребни никакви зглобови или сличне конструкције, што ове хватаљке чини механички прилично једноставним“, рекао је он.
Ипак, можда најважнија карактеристика је његов компактан дизајн, што га чини идеалним избором за употребу у окружењима са високим хигијенским захтевима.
„Дизајн хватаљке се у потпуности може очистити јер су избегнуте рупе и празнине где се остаци производа могу акумулирати“, рекао је Франке.
Дизајн га чини посебно лаким за чишћење, што је бонус за компаније које се баве прерадом хране.
Дизајн хватаљке је резултат немачког истраживачког пројекта из три различита истраживачка института. Немачки институт за прехрамбену технологију имао је идеју за пројекат, као и искуство у погледу хватања апликација за храну. Фраунховер АВВ је извршио конструкцију, а немачки институт за технологију гуме одабрао је еластомерне материјале.

{kind=link}